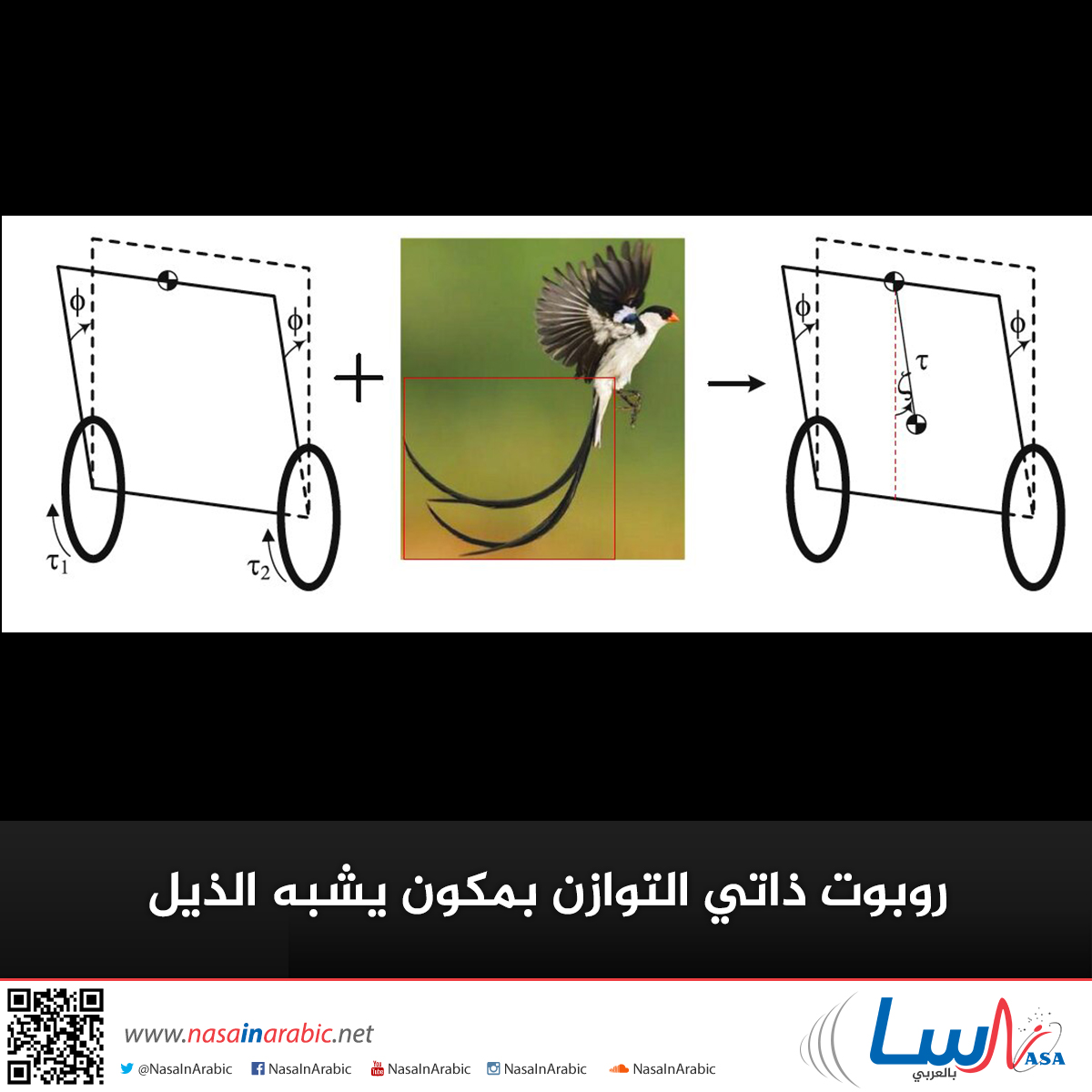

تصميم الروبوت ذاتي التوازن الذي طوره فريق الباحثين. المصدر: تشانغ، رن وتشنغ.
يَعتبرُ الكثيرُ منْ المهندسين والباحثين في علوم الحاسوب الطبيعةَ مصدرُ إلهامهم في تطوير أدوات التقنيات الحديثة. على مدى العقد الماضي، طورت أعداد لا حصر لها من الروبوتات المستوحاة من الطبيعة والسلوك الحيوي للثعابين والأسماك والفهود والطيور وأنواع أخرى من الحيوانات.
صمّمَ فريق من الباحثين في معهد بكين للتقنية مؤخراً روبوتاً جديداً مُستوحَى منْ أسس حيوية يمكنه الحفاظ على توازنه بالاعتماد على آلية تشبه الذيل. قُدِم الروبوت في بحث نشرته صحيفة Springer Proceedings Of 2020 Chinese Intelligent Systems المتخصصة بالأنظمة الذكية الصينية، حيث تتكون أجزاء هذا الروبوت من جسم رئيسي وعجلتين ومكون ذيلي يساعدُه في الحفاظِ على توازنه.
تتحكمُ في حركة ذيل الروبوت وحدةُ تحكم تعملُ في وضع التحريك التكيفي، مما يسمح بتدوير الذيل في اتجاهات مختلفة داخل منطقة موازية لعجلات الروبوت. بصورة أساسية، تحددُ وحدةُ التحكمِ هذه وتنفذُ حركات المكون الذيلي، مما يضمنُ تعزيز استقرار حركة الروبوت أثناء التنقل في بيئته المحيطة.
تَستخدمُ وحدةُ التحكم تقديرات مُستندَة على مبدأ عدم اليقين لتحافظ على توازن الروبوت أثناء تحركه في البيئات النشطة أو المتغيرة؛ حيث يتحرك “الذيل” الاصطناعي في أنماط محددة مصممة لزيادة استقرار الروبوت، وتُحسب هذه الأنماط باستخدام النظريات التي قدمها العالم الرياضي والفيزيائي إلكسندر ليابونونف المعروفة بنظرية الاستقرار: وهي بنية نظرية تصف استقرار الأنظمة الديناميكية.
تعمل معظم الأساليب الحالية لموازنة المركبات ذات العجلتين من خلال جمع بيانات ارتفاع جسم المركبة باستخدام وحدة القياس بالقصور الذاتي (IMU). وحدات القياس هذه هي أجهزة إلكترونية تقيس قوة معينة متواجدة على جسم أو كائن ما، إضافةً إلى قياسها لمعدلات الزوايا والاتجاه وما إلى ذلك. تعمل الأساليب التقليدية على موازنة الروبوتات ذات العجلتين عبر معالجة البيانات التي جمعها مكون التحكم في جهاز القياس بالقصور الذاتي وبناءًا عليها تنفذُ استراتيجيات الموازنة، وعادةً ما تنفذ هذه الاستراتيجيات من خلال ضبط زاوية الميل.
على الرغم من أن العديد من هذه الأساليب قد حققت نتائجاً مُرضِية، إلا أن التصميم الذي اقترحه الباحثون قد قدم بديلاً تطبيقياً لا يتضمن التعديل على زاوية إمالة الروبوت عبر محركات العجلات، وهي تعد واحدة من التقنيات القليلة الموجودة لتعزيز توازن روبوت ذي العجلات مع مراعاة مبدأ عدم اليقين مع الطبيعة المستوحاة من ذيول الحيوانات.
قيم الباحثون فعالية الآلة الروبوتية الذيلية في سلسة من تجارب المحاكاة، وقد توصلوا إلى نتائج واعدة للغاية، فقد تَمكّنَ الذيلُ الاصطناعيُ من إعادة توازن الروبوت في غضون 3.5 ثانية من فقدانه توازنه أثناء تجربته في البيئة المُحاكِية. كذلك، استنتجَ الفريق فعالية عنصر التحكم الذي أعدوه في البيئات المحاطة بالضوضاء والإزعاجات.
مُستقبلاً سيسمحُ التطوير الذي أعدَه الباحثون في الآلة الذيلية بتعزيز استقرار وتوازن الروبوتات الحالية أو حتى المُطوَرة حديثاً. إضافةً إلى أن النتائجَ التي رُصدَت كجزء من هذه الدراسة قد تُلهمُ مُبتكري الروبوتات في تصميم الروبوتات الأخرى ذات المكونات المماثلة.
إلى الآن، قيّم الباحثون في معهد بكين للتقنية روبوتاتِهم ذاتية التوازن في عمليات المحاكاة فقط، أي أن فعاليتها لم تُثبَت بعد في البيئات المادية الحقيقة. يخططُ الباحثون في دراستهم القادمة لبناء نموذج أولي للروبوت وإجراء المزيد من التجارب لاختبار أدائه في السيناريوهات الواقعية.


{kind=link}