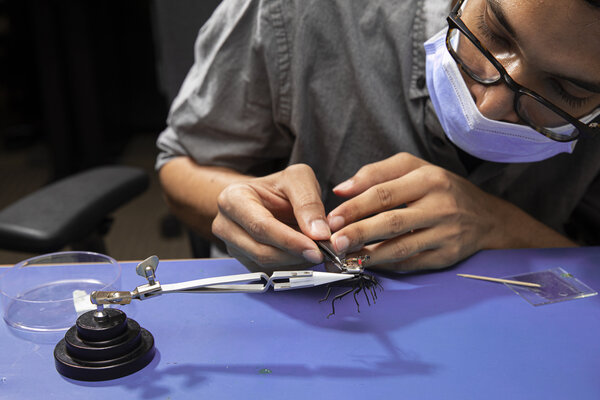
طور باحثون في جامعة واشنطن كاميرا صغيرة يمكنها االتوضع على متن ظهر حشرة. هنا تستكشف خنفساء بيناكات حرم جامعة UW والكاميرا على ظهرها. حقوق الصورة: Mark Stone/University of Washington.
نرى في فيلم الرجل النملة “Ant-Man”، أنه يمكن أن يتقلص بطل الفيلم ويسافر عن طريق التحليق على ظهر حشرة؛ الآن طور الباحثون في جامعة واشنطن كاميرا صغيرة لاسلكية قابلة للتوجيه يمكنها أيضًا الركوب على متن ظهر حشرة، ما يمنح الجميع فرصةً لرؤية منظور Ant-Man للعالم.
تجلس هذه الكاميرا، التي تبث الفيديو إلى هاتف ذكي بسرعة تتراوح من 1 إلى 5 إطارات في الثانية، على ذراعٍ ميكانيكية يمكن تدويرها حتى 60 درجة، ما يسمح للمشاهد بالتقاط لقطة بانورامية عالية الدقة أو تتبع جسم متحرك مع استهلاك قدرٍ ضئيلٍ من الطاقة.
لإثبات وشرح التعددية في استخدامات هذا النظام، الذي يزن نحو 250 ملليغرام (نحوالي عُشر وزن بطاقة اللعب العادية) قام الفريق بتركيبه فوق الخنافس الحية والروبوتات بحجم الحشرات، نُشِرت النتائج في 15 يوليو/تموز في مؤتمر Science Robotics.
قال كبير الباحثين شيام جولاكوتا Shyam Gollakota، أستاذ مشارك في جامعة UW في كلية Paul G. Allen لعلوم وهندسة الكمبيوتر: “لقد أنشأنا نظام كاميرا لاسلكية منخفض الطاقة ومنخفض الوزن، يمكنه التقاط رؤية من منظور الشخص الأول لما يحدث مع حشرة حية فعلية أو خلق رؤية للروبوتات الصغيرة”.
كما أضاف: “الرؤية مهمة للغاية للتواصل وللملاحة، ولكن من الصعب للغاية القيام بذلك على نطاق صغير، ونتيجةً لذلك، قبل عملنا، لم تكن الرؤية اللاسلكية ممكنةً للروبوتات الصغيرة أو الحشرات”.
تستخدم الكاميرات الصغيرة النموذجية، مثل تلك المستخدمة في الهواتف الذكية، الكثير من الطاقة لالتقاط صورٍ ذات زاويةٍ واسعةٍ وعالية الدقة، وهذا لا يعمل على مقياس الحشرات.
على الرغم من أن الكاميرات نفسها خفيفة الوزن، لكنّ البطاريات التي تحتاجها لدعمها تجعل النظام العام ثقيلًا جدًا بالنسبة للحشرات -أو الروبوتات التي بحجم الحشرات- للتجول، لذا أخذ الفريق قدرات هذه الأحياء بعين الاعتبار وتعلموا منها لتطوير عملهم.
قال المؤلف المشارك سوير فولر Sawyer Fuller، أستاذ مساعد في الهندسة الميكانيكية بجامعة UW: “على غرار الكاميرات، تتطلب الرؤية في الحيوانات الكثير من القوة؛ إنها أقل أهميةً في الكائنات الكبيرة مثل البشر، لكن الذباب يستخدم من 10 إلى 20% من طاقته أثناء الراحة لتشغيل أدمغته فقط، ومعظمها مخصص للمعالجة البصرية”.
كما قال: “للمساعدة في خفض التكلفة، تمتلك بعض أنواع الذباب منطقةً صغيرةً وعالية الدقة من أعينها المركبة، وهي تدير رؤوسها للتوجيه حيث تريد أن ترى بوضوح أكبر، مثل مطاردة فريسة، ما يوفر القدرة على وجود دقة عالية في مجالها البصري بأكمله”.

لتقليد نظام رؤية الحيوان، استخدم الباحثون كاميرا صغيرةً للغاية ذاتَ طاقةٍ منخفضةٍ للغاية بالأبيض والأسود يمكنها أن تجتاح مجال الرؤية بمساعدة ذراع ميكانيكية؛ يتحرك الذراع عندما يطبّق الفريق جهدًا عاليًا، ما يجعل المادة (أي حيوان التجريب) تنحني وتحرك الكاميرا إلى الموضع المطلوب، ما لم يطبق الفريق المزيد من القوة، يبقى الذراع عند هذه الزاوية لمدة دقيقةٍ تقريبًا قبل الاسترخاء مرةً أخرى إلى موضعه الأصلي، وهذا مشابهٌ للكيفية التي يمكن بها للناس أن يبقوا رؤوسهم في اتجاهٍ واحدٍ فقط لفترةٍ قصيرةٍ من الوقت قبل العودة إلى وضعٍ طبيعيٍّ أكثر.
قال الكاتب المشارك فيكرام إيير Vikram Iyer، طالب الدكتوراه في الهندسة الكهربائية وهندسة الحاسبات: “إحدى مزايا القدرة على تحريك الكاميرا هي أنه يمكنك الحصول على رؤيةٍ واسعةٍ لما يحدث دون استهلاك قدرٍ كبيرٍ من الطاقة؛ يمكننا تتبع جسم متحرك دون الحاجة إلى إنفاق الطاقة لتحريك روبوت كامل. هذه الصور أيضًا بدقةٍ أعلى ممّا لو استخدمنا عدسةً واسعة الزاوية، والتي من شأنها أن تنشئ صورةً بنفس عدد وحدات البكسل pixels مقسمة على مساحةٍ أكبر بكثير”.
التحكم في الكاميرا والذراع عبر البلوتوث من هاتف ذكي من مسافة تصل إلى 120 مترًا، وهي أطول بقليل من ملعب كرة قدم.
ربط الباحثون نظامهم القابل للإزالة على ظهور نوعين مختلفين من الخنافس: خنفساء من الأنواع التي تمتاز بقدرتها على التظاهر بالموت، وخنفساء بيناكات، وقال الباحثون إنه من المعروف أن الخنافس المماثلة قادرةٌ على حمل حمولاتٍ أثقل من نصف غرام.
وقال المؤلف المشارك علي نجفي، طالب الدكتوراه في الهندسة الكهربائية وهندسة الكمبيوتر: “تأكدنا من أن الخنافس لا تزال تتحرك بشكلٍ صحيح عندما كانت تحمل نظامنا، لقد كانت قادرةً على التنقل بحريةٍ عبر الحصى، والمنحدرات، وحتى تسلق الأشجار”.
عاشت الخنافس أيضًا لمدة عام على الأقل بعد انتهاء التجربة.
قال أيير: “أضفنا مقياس تسارعٍ صغيرًا إلى نظامنا حتى نتمكن من اكتشاف متى تتحرك الخنفساء، وتُلتقَط الصور فقط خلال تلك الفترة. إذا كانت الكاميرا تتدفق باستمرار بدون مقياس التسارع هذا، فيمكننا تسجيل من ساعة إلى ساعتين قبل نفاد البطارية، أما باستخدام مقياس التسارع، يمكننا التسجيل لمدة ست ساعاتٍ أو أكثر، وذلك اعتمادًا على مستوى نشاط الخنفساء في التجربة”.
استخدم الباحثون أيضًا نظام الكاميرات الخاص بهم لتصميم أصغر روبوت في العالم يتمتع باستقلالٍ واستهلاكٍ ذاتيٍّ للطاقة مع رؤيةٍ لاسلكية؛ يستخدم هذا الروبوت بحجم الحشرات اهتزازاتٍ للتحرك ويستهلك تقريبًا نفس الطاقة التي تحتاجها أجهزة راديو Bluetooth منخفضة الطاقة للعمل.
و لكن مع ذلك، وجد الفريق أن الاهتزازات أدت إلى اهتزاز الكاميرا وإنتاج صورٍ مشوهة.
حلّ الباحثون هذه المشكلة عن طريق إيقاف الروبوت للحظات، والتقاط صورة ثم استئناف رحلته، باستخدام هذه الإستراتيجية، كان النظام لا يزال قادرًا على التحرك نحو 2 إلى 3 سم في الثانية -أسرع من أي روبوت صغير آخر يستخدم الاهتزازات للتحرك- وكان عمر البطارية نحو 90 دقيقة.
في حين أن الفريق كان متحمسًا بشأن الكاميرات المحمولة خفيفة الوزن وذات الطاقة المنخفضة، يقر الباحثون أن هذه التكنولوجيا تأتي مع مجموعةٍ جديدةٍ من مخاطر الخصوصية.
وقال غولاكوتا: “بصفتنا باحثين، نؤمن بقوةٍ أنه من المهم حقًا وضع الأشياء في المجال العام حتى يدرك الناس المخاطر، وبالتالي يمكن للناس البدء في إيجاد حلول لمعالجتها”.
وقال الباحثون إن التطبيقات لهذا النظام يمكن أن تتراوح من علم الأحياء إلى استكشاف بيئات جديدة؛ يأمل الفريق في أن تتطلب الإصدارات المستقبلية من الكاميرا طاقةً أقل، وأن تكون خاليةً من البطارية، وربما تعمل بالطاقة الشمسية.
قال إيير: “هذه هي المرة الأولى التي تكون لدينا فيها رؤيةٌ من منظور الشخص الأول من الجزء الخلفي من خنفساء أثناء التجول، هناك العديد من الأسئلة التي يمكنك استكشافها، مثل كيف يمكن أن تستجيب الخنفساء لمحفزات مختلفة تراها في البيئة؟ ولكن أيضًا، يمكن للحشرات أن تجتاز البيئات الصخرية، وهو أمرٌ صعبٌ حقًا بالنسبة للروبوتات على هذا النطاق، لذا فإن هذا النظام يمكن أن يساعدنا أيضًا في الخروج من خلال السماح لنا برؤية أو جمع عينات من الأماكن التي يصعب التنقل فيها”.





{kind=link}